Fundamentos de Geoestatística em Cinco Lições (Journel, 1989)
Fundamentos de Geoestatística em Cinco Lições (Journel, 1989)
Uma importante contribuição foi oferecida por Andre G. Journel, por meio de uma monografia intitulada “Fundamentos de geoestatística em cinco lições”. Trata-se do material de um minicurso realizado durante o 28º Congresso Internacional de Geologia em Washington.
Capítulos
Com apenas 40 páginas de extensão, esta monografia apresenta as seguintes lições:
- I) revisão da estatística e notações;
- II) teoria da regressão linear ou krigagem simples;
- III) regressão linear sob restrições e krigagem ordinária;
- IV) avaliação não paramétrica da incerteza local;
- V) simulações estocásticas para imageamento da incerteza espacial.
Lição I – Revisão de Estatística e Notações
Na lição I, Journel (1989, p. 4) mostra a questão da relação de ordem que aparece com frequência na krigagem indicadora, onde a função de distribuição acumulada F(z) e sua derivada função densidade de probabilidade f(z) devem verificar as seguintes condições:

e F(z) ≥ F(z’) para todo z ≥ z’, ou seja, a função de distribuição acumulada é função não decrescente de z.
Ainda na lição I, destaca-se a interpretação geométrica da função variograma, conforme o diagrama de dispersão da Figura 1.

Lição II – Teoria da Regressão Linear, ou Krigagem Simples
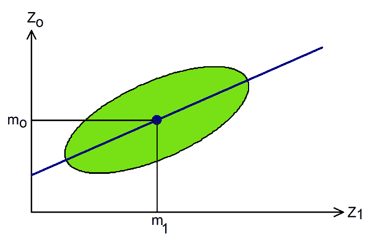
Na lição II, Journel (1989, p. 10-12) desenvolve a equação da krigagem simples e demonstra que ela pode ser descrita como uma reta de regressão:
ou![]()
Isso significa que a dispersão dos pares de pontos (Zo, Z1) pode ser representada por uma reta de regressão (Figura 2).
Lição III – Regressão Linear Sob Restrições e Krigagem Ordinária (Linear Regression Treory, or Simple Kriging)
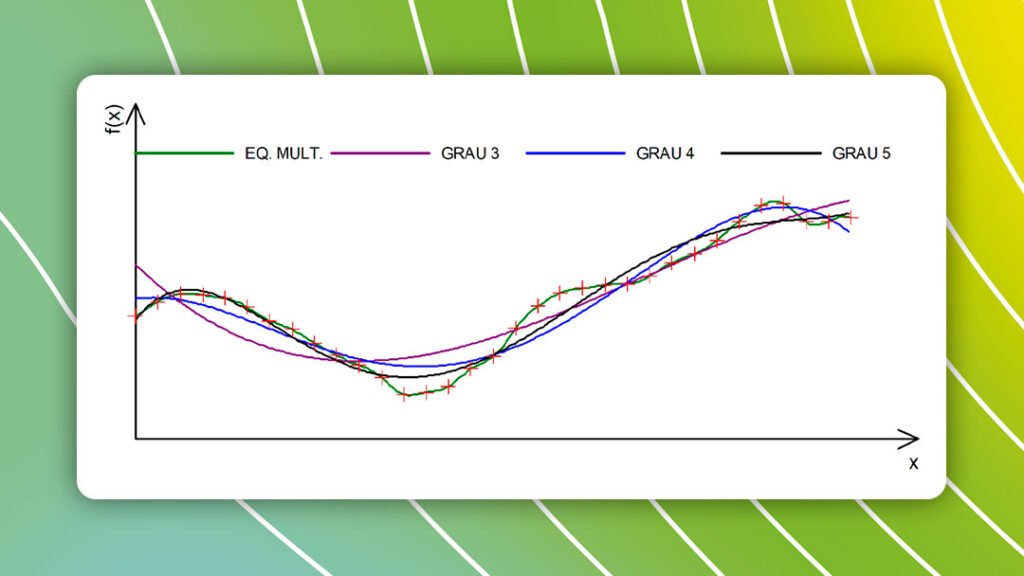
A lição III aborda a questão da regressão linear sob restrição e krigagem ordinária (Journel, 1989, p. 15-21). O autor ainda desenvolve a krigagem na presença de tendência, onde afirma que a condição de não viés filtra a média constante m, mas na existência de uma função de tendência mais complexa, a média pode ser modelada por uma soma de funções (Journel, 1989, p. 18):

Geralmente, a componente de tendência é aproximada por polinômios de baixo grau, com grau máximo de três, sendo que, por definição, o termo zero é a função constante (Journel, 1989, p. 18): ![]()
A condição de não viés garante que em média o valor estimado é igual ao valor real:
![]()
Inserindo a função de tendência na condição de não viés, tem-se (Journel, 1989, p. 18): 
Considerando o estimador linear como (Journel, 1989, p. 18):
Retornando à expressão de não viés e substituindo os termos apresentados, tem-se (Journel, 1989, p. 18):

Assim, a condição de não viés da krigagem universal é obtida, quaisquer que sejam os coeficientes desconhecidos da função de tendência, impondo-se L+1 restrições no cálculo dos pesos da krigagem universal (Journel, 1989, p. 18): 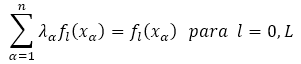
Observe-se que para L=0, a condição de restrição se torna ∑αλα = 1, ou seja, a krigagem ordinária. Segundo Journel (1989, p. 19), as L+1 condições de restrição também são conhecidas como condições de universalidade, pois garantem o não viés, quaisquer que sejam os coeficientes desconhecidos (al, l=0,L).
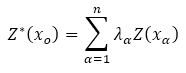
As funções aleatórias intrínsecas de ordem L são apresentadas na lição III, cujo desenvolvimento parte do estimador linear:

O erro de estimativa Y pode ser visto como uma combinação linear de (n+1) variáveis aleatórias (Journel, 1989, p. 19):

sendo que:
Portanto, conforme essa expressão:
![]()
A variância do erro, ou seja, a variância da combinação linear, pode ser escrita como (Journel, 1989, p. 19):

Journel (1989, p. 19-20) desenvolve a expressão para o caso de uma média constante E{Z(x)}=m, que resulta no incremento generalizado de ordem zero:

Qualquer combinação Y=∑nα=0 dα Z(xα), tal que os pesos dα estejam sujeitos a (L+1) condições de não viés, denomina-se incremento generalizado de ordem L, cuja variância em termos da covariância intrínseca KL(h) se torna (Journel, 1989, p. 20):

Com as seguintes condições de restrição:
Observe-se que o incremento generalizado de ordem L, Y=∑nα=0 dα Z(xα), filtra qualquer polinômio de ordem L e mais geralmente qualquer função
![]() ,
,
conforme demonstra Journel (1989, p. 20):

Uma função aleatória intrínseca de ordem L é uma classe de funções aleatórias definidas por um polinômio arbitrário de ordem L e mais geralmente uma tendência arbitrária do tipo
![]() , conforme Journel (1989, p. 20).
, conforme Journel (1989, p. 20).
Como se pode verificar, o entendimento da função aleatória intrínseca de ordem L fica mais fácil quando se desenvolve a krigagem universal, como faz Journel (1989, p. 18-21) na lição III.
Lição IV – Avaliação Não-Paramétrica da Incerteza Local (Non-parametric assessment of local uncertainty)
A lição IV trata da questão da avaliação não paramétrica da incerteza local. A abordagem interessante envolve a função indicadora, como se verá a seguir. Supondo que foram feitas n medidas de uma variável {zj, j=1,n}, deseja-se saber qual é a probabilidade que um valor desconhecido z é menor ou igual a um limiar zo, que pode ser determinada a partir da proporção de realizações que satisfaçam: zj ≤ zo (Journel, 1989, p. 22). Segundo esse autor, fazendo isso, significa que o valor desconhecido z passa a ser uma variável aleatória Z, cuja função de distribuição acumulada pode ser modelada como:![]()
Introduz-se assim a função indicadora em relação a um limiar zo, como (Journel, 1989, p. 22):
Dessa forma, segundo Journel (1989, p. 22), o modelo de incerteza pode ser escrito como: 
Em seguida, o autor trata da krigagem indicadora para a estimativa da função de distribuição acumulada em um ponto não amostrado (Journel, 1989, p. 25).
Lição V – Simulação Estocástica para o Mapeamento da Incerteza Espacial (Stochastic imaging for imaging Spatial Uncertainty)
A lição V é voltada para as simulações estocásticas visando o mapeamento da incerteza espacial. Trata-se em obter N realizações da simulação estocástica em um conjunto de pontos não amostrados {xj, j=1,n}, que pode ser modelada pela distribuição de probabilidade que determina em cada realização a probabilidade ser maior que um determinado limiar zo (Journel, 1989, p. 30):![]()
Observe-se que agora os índices do vetor localização x se referem às N realizações sobre todos os (n) pontos de dados amostrais {xj, j=1,n}.
A simulação estocástica tem sido usada frequentemente na mineração para diversos fins, desde a modelagem da incerteza (no lugar da variância de krigagem), na geração de cenários conforme níveis de probabilidade e para as mais variadas aplicações incluindo validação do modelo de blocos. Parece que a simulação estocástica é a solução perfeita para solução de todos os problemas na mineração, mas isso tem que ser visto com muito cuidado. Assim, apresenta-se uma revisão da origem e justificativa para aplicação da simulação estocástica na geoestatística, de acordo com Journel (1989, p. 31-38).
Resenha anterior:
Retrospectiva da Geoestatística XIX: Geoestatística e Geologia do Petróleo (Hohn, 1999)
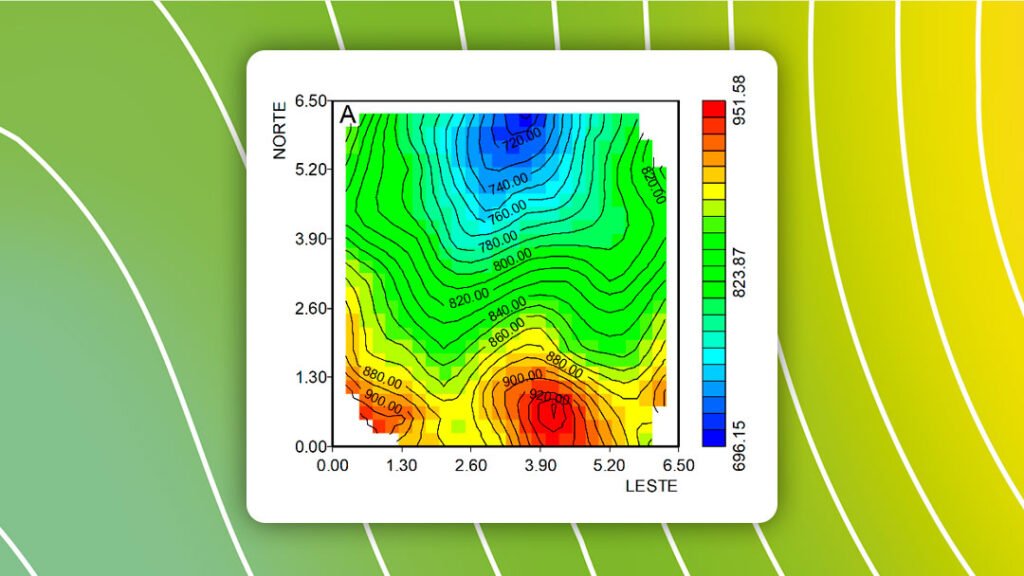
Inicialmente, Journel (1989, p. 31) faz a devida situação do problema entre simulação ou estimativa. Segundo esse autor, para fins de caracterização de reservatórios, a detecção dos padrões de ocorrência de valores extremos (permeabilidade, porosidade) é mais crítica e requer mapas que honrem a continuidade espacial e que proporcionem uma avaliação da incerteza espacial. Pode-se ver o processo de caracterização de reservatório como aquele que proporciona a entrada correta para a função de transferência (Figura 3) representando algum aspecto da engenharia de reservatório (Journel, 1989, p. 31).

Essa aproximação requer processar a função transferência para cada imagem equiprovável, que poderia ser extremamente entediante (Journel, 1989, p. 31). Assim, segundo esse autor, a solução seria selecionar entre as imagens equiprováveis, duas diametralmente opostas correspondendo ao pior e melhor caso e uma imagem mediana.
Geralmente, tem-se um conjunto de realizações, que permitem modelar a incerteza a partir da distribuição de respostas (Journel, 1989, p. 31):![]()
A distribuição resposta permite determinar a probabilidade que o valor em um ponto não amostrado é maior que o limiar ro, ou seja, P(R > ro). Isso significa que em cada ponto não amostrado existem L valores que podem ser representados por uma função de distribuição acumulada condicional. Sendo que ela é caracterizada pelos dois momentos: a média e a variância.
Uma importante fórmula que permite calcular a distribuição normal bivariada é introduzida nesta lição (Journel, 1989, p. 33):

Onde yp = G-100(p) é o escore da distribuição normal.
Esta expressão é usada para o teste de biGaussianidade dos dados, pois quando se trabalha com a hipótese de multiGaussianidade dos dados, deve-se garantir que não apenas a distribuição amostral seja gaussiana, mas também a distribuição de dois, três ou mais pontos seja gaussiana. Como a verificação da distribuição para três ou mais pontos é impossível na prática, faz-se o teste de biGaussianidade dos dados usando essa equação.
A codificação indicadora é descrita como transformação dos dados para a simulação indicadora sequencial. A Figura 4 representa algumas situações possíveis para a codificação indicadora (Journel, 1989, p. 34):

Qualquer resultado de medida ou observação pode ser codificado em relação ao valor de referência ou de corte (z), como (Journel, 1989, p. 32):
Dessa forma:
- Na posição x1, z é assumido como Z(x1), mostrando que os valores acima do datum são maiores e abaixo são menores (Figura 4).
- Na localização x2, sabe-se apenas que o valor e, portanto, as funções indicadoras nesse intervalo são desconhecidas (Journel, 1989, p. 34).
- Para a localização x3, sabe-se que o datum Z(x3) está no intervalo ]a3,b3] com uma distribuição de probabilidade à priori (vide Figura 4 na localização x3).
- Quando não se tem nenhuma informação, a codificação indicadora não é possível, como ocorre na localização x4.
Em seguida, a simulação indicadora sequencial é descrita com apresentação de um estudo de caso.
Como se pôde verificar, esta obra abrange os fundamentos da geoestatística em apenas 40 páginas, muito bem escritas, onde o autor demonstra a origem de técnicas e conceitos matemáticos empregados atualmente.
Referência
JOURNEL, Andre G. Fundamentals of Geostatistics in Five Lessons. Washington, American Geophysical Union, 1989. 40 p.
Primeira resenha da série:
Retrospectiva da Geoestatística I: Tratado de Geoestatística Aplicada (Matheron)